.jpg)
.webp)
Harmonic Drive® 諧波減速機的應用場景,圖片取自「統合報告書 HDS REPORT 2024」
Harmonic Drive®(諧波減速機)是目前精密傳動領域中,能同時實現高減速比、零背隙與緊湊體積的少數機械元件之一。從工業機器人的每個關節,到半導體設備的精密定位,再到太空探測任務的驅動系統,它的應用已遍及幾乎所有需要高精度旋轉傳動的場合。
然而,正因為它的特性與傳統齒輪箱差距很大,選錯型號或忽略使用限制,往往是機台提早損壞的根本原因。
在幫客戶選諧波減速機的過程中,有幾個問題是幾乎每次都會被問到的:「諧波到底是什麼原理?」、「CSG、CSF 這些系列代號有什麼差別?」、「為什麼我的設備用了一陣子之後開始出現異音?」。很多工程師在初步評估時,往往只看馬達額定出力就急著決定減速機型號,卻忽略了系統整體的動態負載,導致後續機台壽命不如預期。
這篇文章以志城(Harmonic Drive® 原廠台灣授權代理商)的角度出發,整合了原廠型錄與實務選型經驗,涵蓋原理、各系列差異、使用限制、應用場景,以及進入選型計算前需要了解的基本觀念。不論你是正在評估設備規格的機構工程師,或是想搞清楚諧波減速機與行星減速機差在哪裡的讀者,都可以在這篇文章裡找到答案。
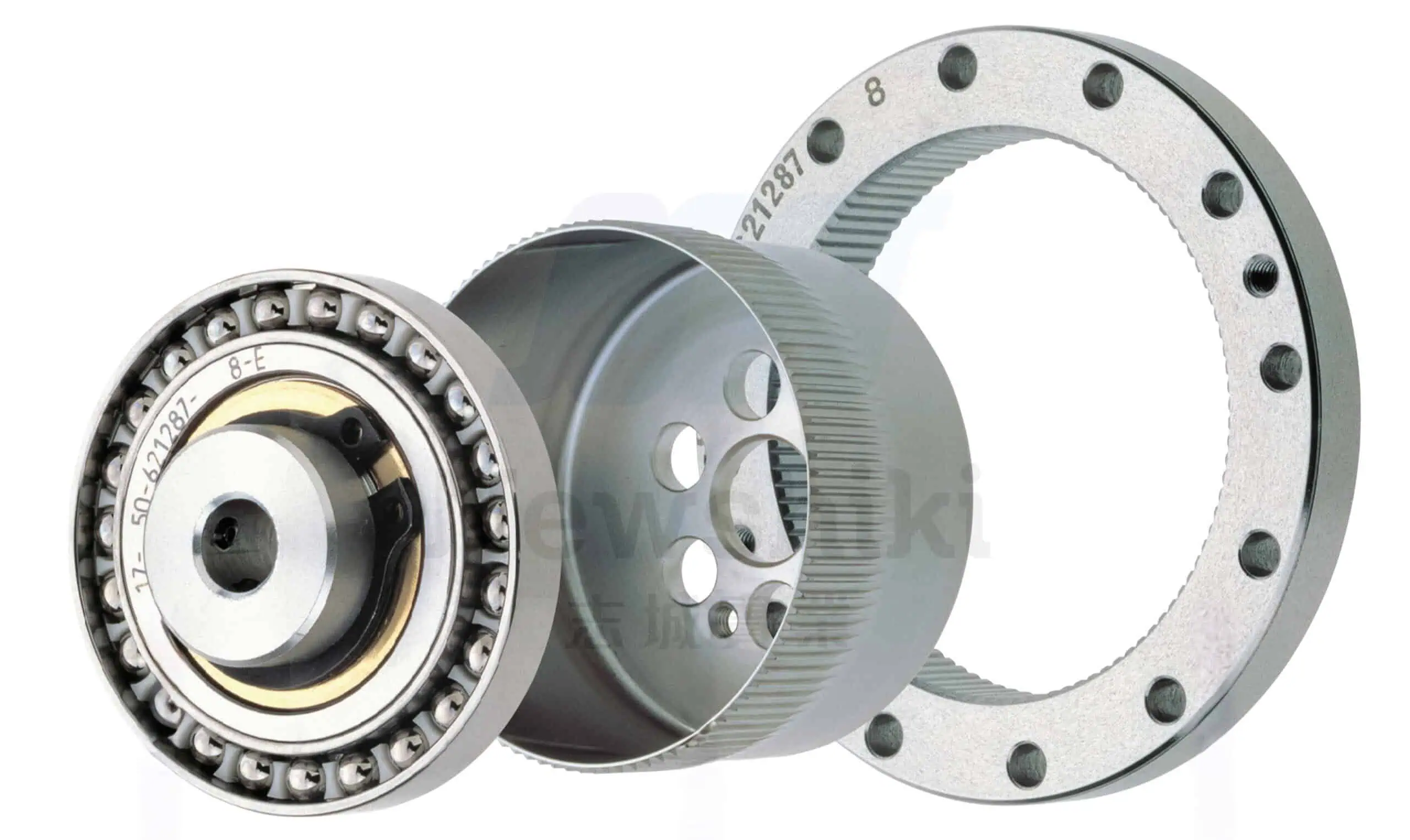
Harmonic Drive® 諧波減速機的組件結構與運作原理
Harmonic Drive® 諧波齒輪傳動機構最初是由美國發明家 C. W. Musser 發明,其獨創了應用金屬彈性變形的傳動方式。它最大的特色在於僅由 3 個基本零件組成:

- 波產生器 (Wave Generator):
- 橢圓形凸輪外圈嵌有薄型滾珠軸承,軸承外輪可產生彈性變形。通常安裝於輸入軸(馬達側)。
- 彈性齒杯 (Flexspline):
- 薄杯狀的金屬彈性體,開口部外圈刻有齒槽。它會受到波產生器撐開,變成橢圓形。
- 剛性齒輪 (Circular Spline):
- 剛體的內齒輪,內部齒數比彈性齒杯多 2 個齒,通常固定於護殼上。

- 動作原理:
- 當橢圓形的波產生器旋轉時,彈性齒杯的長軸部位會與剛性齒輪嚙合,短軸部位則完全分離。由於彈性齒杯比剛性齒輪少了 2 個齒,當波產生器順時針旋轉一圈(360度)時,彈性齒杯會朝反方向(逆時針)移動 2 個齒的距離。這個微小的齒數差,正是諧波減速機能在單段同軸內實現高減速比的關鍵。
諧波減速機與其它減速機相比的優勢
相較於一般的行星減速機或齒輪箱,Harmonic Drive® 在以下幾個面向有明顯優勢:
- 無背隙 (Zero Backlash):
- 齒輪的嚙合沒有背隙,且定位精度極高,是高精密控制機構必要的特性。
- 高轉矩容量:
- 一般齒輪只有少數幾齒嚙合,但諧波減速機同時嚙合的齒數高達總齒數的 30%,且在 180 度對稱位置受力,因此能傳達非常大的轉矩。
- 小型、輕量:
- 僅由 3 個基本零件組成,易於小型化及輕量化。
- 單段高減速比:
- 不需複雜的機構,單段即可達成 1/30~1/320 的高減速比。
諧波減速機常見的應用場景

- 工業用機械手臂與協作機器人:
- 各式機械手臂是 Harmonic Drive® 目前出貨占比最高的應用領域,涵蓋垂直多關節、水平多關節(SCARA 型)、搬運用、射出成形取出等多種機型的關節與手部驅動。協作機器人(Cobot)著重人機協同作業,對減速機的精度、安全性與輕量化要求更為嚴格,同樣是重要的採用場景。兩者共同的核心需求是:在輕量緊湊的機身內,於每個關節實現高精度、高轉矩的旋轉傳動。
- 人形機器人:
- 人形機器人(Humanoid Robot)是目前投入最多資源的新興方向,也是長期銷售願景目標的主要驅動力之一。對各手臂關節的旋轉驅動需要同時達到高速、高精度與高轉矩。推薦用於手臂關節的產品包含減速機型的 SHD-2SH 系列,以及整合了馬達與減速機的 FHA-C mini 伺服致動器。部分對傳動效率或低減速比有特殊需求的場合,精密行星減速機 HarmonicPlanetary® HPG 系列也是可評估的替代選項。
- 手指機器人模組:
- 有別於機械手臂各關節使用的中型減速機,手指層級的驅動模組對空間限制更為極端,需要在體積極小的機構內達到精確的旋轉控制,研發門檻與機械手臂關節不同,是獨立的應用開發方向。針對手指驅動的推薦產品為純減速機型的 CSF supermini 系列,以及整合馬達的 RSF supermini 伺服致動器,兩者皆為目前可對應指關節空間限制的最小型選項。
- 半導體製造設備:
- 光罩生產設備的搬運機構、晶圓搬運設備的旋轉定位軸、以及晶圓加工設備的分度工作台,都需要無背隙、高重複定位精度的旋轉傳動。
- FPD、PCB 與 SMT 製造設備:
- 平面顯示器製造設備的各軸定位驅動、PCB 銑頭驅動與工具換刀機構、旋轉平台定位、以及 SMT 電子組裝設備(錫膏印刷機、電子零件分配機)的旋轉軸,都在採用諧波減速機。
- 工具機 ATC 換刀機構與旋轉工作台:
- 5軸加工中心機的自動換刀機構(ATC)、刀具庫驅動、以及分度旋轉工作台,是工具機產業中諧波減速機的典型應用位置。CSG-2UK 密封模組型就是針對此類應用設計的產品,說明文件中亦記載:「建議運用在工具機及一般工業機械的工件運送和驅動工具庫等各機構部位。」
- 無人搬運車(AGV):
- 工廠與物流環境中的無人搬運車,用於各軸的旋轉定位驅動。
諧波減速機特殊應用場景
以下應用場景均需事先與 Harmonic Drive® 原廠評估,標準型錄產品可能無法直接適用,通常需要客製化特殊品對應。如有相關需求,請透過志城提出,以確保需求規格的完整性。
- 醫療設備:
- 包含手術機器人的關節驅動、動力輔助服(Power Suit,外骨骼型)的關節機構、以及護理機器人的輔助動作。屬於直接作用或輔助人體的設備,須事先確認使用情境與安全規格。
- 車載與移動載具:
- 電動車輛、eVTOL(電動垂直起降飛行器,俗稱「飛行汽車」)及 Lean Mobility 三輪電動載具等均為已知的應用場景,也是新興成長方向之一。
- 航太與太空探索:
- Harmonic Drive® 在航太領域有實際搭載紀錄,包含 JAXA 的小行星探測器「隼鳥」與「隼鳥2號」、NASA/JPL 的火星探測車「毅力號」(Perseverance)、以及夏威夷茂納凱亞山的大型光學紅外線望遠鏡「昴」(Subaru Telescope)。
- 軍事防衛與無人機:
- 人形機器人在軍事領域的潛在應用包含爆炸物處理與危險環境中的救援任務;無人機(UAV)傳動系統同樣是應用領域之一。
上述所有特殊應用場景,均需事先與 Harmonic Drive® 原廠詳細討論使用情境與安全規範。
Harmonic Drive® 諧波減速機各系列型號的差異與選用方向
Harmonic Drive® 的產品依整合程度,可分為三種類型:元件型(自行設計機殼)、模組型(完整組件,可直接安裝)、以及 Gearhead 型(直接對接伺服馬達,最高整合度)。超小型系列則是針對空間極端受限場合設計的小容量產品線,型式涵蓋元件型與模組型。選型前先確認自己需要哪一種,再依應用需求挑選系列。
元件型(Component Type)
元件型只包含三個基本零件(波產生器、彈性齒杯、剛性齒輪),需要由客戶自行設計機殼、輸出軸支撐與軸承配置。設計自由度高,但對機構工程師的要求也較高。

- CSF 系列(標準型):
- Harmonic Drive® 的基本款,體積精巧、無背隙且具備高剛性與優異的定位精度。壽命 7,000 小時。
- CSG 系列(高轉矩型):
- 為了追求更高負載容量與可靠性,轉矩容量較 CSF 提升了 30%。波產生器軸承壽命更從 7,000 小時延長至 10,000 小時。
- SHF 系列(大口徑中空型):
- 採用彈性齒杯向外打開的帽型設計,實現了大口徑中空孔與薄型結構,方便將配線、管路甚至雷射光通過致動器中央。壽命 7,000 小時。
- SHG 系列(中空高轉矩型):
- SHF 的升級版,同樣具備中空大口徑,但轉矩容量比 SHF 提升 30%,壽命同樣達到 10,000 小時。
- CSD 系列(超薄型):
- 厚度僅為 CSF 系列的 1/2,且同樣具備中空結構,適合對安裝空間有嚴格限制的設計。壽命 7,000 小時。
模組型(Unit Type)
模組型是將元件型組入護殼內,並在輸出軸端內置精密高剛性交叉滾柱軸承的完整組件,可直接支撐外部負載。相較於元件型,模組型大幅降低設計工時,也能降低總成本,是目前實際採購中非常常見的選擇。

- SHD 系列(超薄型中空模組):
- 帽型中空軸模組型中追求最薄尺寸的系列。
- 簡易模組型(2SH)的軸方向長度比 SHF 縮短約 50%。模組型(2UH)在薄型基礎上再以鋁合金大幅輕量化。
- 以 SCARA 型機械手臂為代表應用,適合高度受限的設備。
- CSG-2UK(密封全模組型):
- 採用密封結構的全模組,免去客戶設計密封機構的需要,適合工具機等有潤滑脂滲漏顧慮的場合,直接建議用於工具機刀具庫驅動。
Gearhead 型(GH,馬達直聯型)
Gearhead 型是整合程度最高的選擇,專為希望直接對接伺服馬達、簡化機構設計工時的工程師設計——即使不熟悉 Harmonic Drive® 的使用者也能輕鬆安裝使用。選用時,客戶提供欲搭配的伺服馬達型號,志城向原廠取得對應安裝圖面,確保與馬達的精確對接。輸出端可依需求選擇法蘭面或輸出軸型式。

目前支援各主流品牌伺服馬達,具備優良密封結構與無背隙特性,分為 CSG-GH(高轉矩型,壽命 10,000 小時)與 CSF-GH(標準型,壽命 7,000 小時)兩個系列。
超小型系列
超小型系列是 Harmonic Drive® 產品線中專為空間限制最嚴苛的場合設計的小容量產品,以「在極小體積內實現無背隙、高定位精度與高旋轉精度」為核心目標。原廠將這些極小尺寸的零件加工為可直接使用的模組化產品,讓工程師能直接導入手指關節、微型機構或高密度裝配的驅動部位,而不需要自行設計機殼。

- CSF supermini 系列:
- Harmonic Drive® 的最小型號(型號 3),以能夠安裝至高性能小型伺服馬達為開發概念。採用獨自開發的小型 4 點接觸滾珠軸承作為主軸承。容許最高輸入轉速 10,000 r/min,有雙軸模組型(1U)與減速機型(1U-CC)兩種型式。
- CSF-mini 系列:
- 型號 5~14 的小型模組系列,型式比 supermini 更豐富,包含雙軸型、凸緣輸出型、馬達安裝型等共 6 種型式(1U、1U-F、1U-CC、1U-CC-F、2XH-J、2XH-F),可對應皮帶、齒輪、聯接器等多種輸入形態,彈性較高。採用小型 4 點接觸滾珠軸承,最高輸入轉速視型號為 8,500~10,000 r/min。
諧波減速機的使用限制
諧波減速機有幾個使用上的硬性限制,選型或機構設計時若未考慮到,會直接導致設備損壞:
- 連續高負載容易發熱與劣化:
- 伺服系統幾乎不會有連續固定負載的狀況。如果機台需要長時間高轉速或高負載連續運轉,只要平均負載轉矩超過容許最大值,就會導致減速機發熱、內部潤滑劑提早劣化,甚至加劇齒面磨耗。
- 嚴禁過大的衝擊轉矩(棘輪效應與疲勞破壞):
- Harmonic Drive® 是依靠金屬的彈性變形來傳動,因此極限轉矩受限於齒根的疲勞強度。當發生異常碰撞或緊急停止,瞬間衝擊超過極限時,會發生「棘輪效應 (Ratcheting)」——齒輪無法正常嚙合而偏向單側空轉。棘輪效應發生後若繼續運轉,產生的磨屑會導致齒輪早期磨耗,波產生器軸承壽命也會縮短;振動持續則會進一步引起彈性齒杯破損。
- 系統共振問題:
- 在結構設計上,減速機輸入軸每旋轉 1 次,就會產生 2 次的角傳動誤差成分(頻率為輸入頻率的 2 倍)。如果這個頻率剛好與設備機體或負載的固有振動數重疊,就會產生共振放大效應,在設計長懸臂機構時需要特別避開。
- 對密封機構要求極高:
- 為了防止潤滑脂滲漏並維持高耐久性,機構設計上必須嚴格採用密封設計(包含油封、O型環接合面、具封止效果的螺絲固定劑等),否則運轉中的油外漏會導致機台汙染與減速機潤滑不良。
- 安裝精度不足,會引發異音與振動:
- 組裝時的不良會產生震動或異音;安裝精度若不足,可能造成振動、降低壽命、降低精度與損壞等異常。諧波減速機要求輸入軸、剛性齒輪、輸出軸及機殼必須精確對正同心,且輸入與輸出軸須為兩點支撐結構,以承受徑向與推力負載,並避免對波產生器與彈性齒杯施加多餘的力。
- 在現場,安裝精度不足或棘輪效應發生後繼續運轉,最先反映出來的通常是異音。異音的成因不只一種——可能是組裝不良引起的振動、異物進入齒合部位,也可能是齒面已有磨耗。聽到異音時,需要進一步確認才能判斷處置方向。
- 輸出端可反向驅動輸入端:
- 規格表中定義了「加速起動轉矩」——即由輸出端施加轉矩、使輸入端開始旋轉所需的轉矩,這說明諧波減速機可由輸出端反向驅動輸入端,馬達失去轉矩時輸出軸並不會自行停止。使用在可能發生重大損失的設備時,必須另行安裝安全裝置,以避免在輸出失控時引發事故。
什麼場合不建議選諧波減速機?
以下是幾個不適合用諧波減速機的場合:
- 固定負載、固定方向連續運轉:
- 這種運轉模式可能引發潤滑不良。諧波減速機的設計前提是伺服系統的來回啟停,長時間單向固定負載會讓潤滑脂分佈不均,導致提早磨耗。
- 輸出端有可能被外力反向推動的場合:
- 如前所述,諧波可由輸出端反向驅動輸入端。若應用場合存在需要在馬達失電或停止後仍保持輸出位置的需求,系統設計上必須另行加入安全裝置。
- 頻繁或強度超過容許值的衝擊負載:
- 衝擊轉矩不得超過瞬間容許最大轉矩,且衝擊轉矩的施加次數有限制(每次衝擊的彈性齒杯彈性變形次數上限為 1.0×10⁴ 次)。一旦超過,棘輪效應發生後繼續運轉,會快速導致彈性齒杯疲勞破壞。
- 環境中有水、油(飛濺)、腐蝕性氣體或金屬粉塵:
- 基本使用環境要求為:無水、無油(飛濺)、無腐蝕性及爆炸性氣體、無金屬粉等異物。若安裝環境不符這些條件,應優先選擇密封型模組(如 CSG-2UK),或在機構設計上確保嚴格的密封隔離。
若以上標準配置仍無法滿足使用環境,Harmonic Drive® 提供特殊品的客製化評估。產品規格表中列有「自訂」項目,針對標準溫度範圍以外的應用也有特殊環境用潤滑劑的替代方案可選。客製化的流程是:由客戶提供具體的使用條件(包含環境介質、溫度範圍、負載規格等),評估可行性後進入特殊品的開發與報價。如有相關需求,請透過志城提出。
諧波減速機選型邏輯:為什麼不能只看馬達額定出力?
很多工程師習慣用「馬達額定轉矩 × 減速比」來挑選減速機,這對諧波減速機來說是非常危險的作法。選型的基本原則是:針對熱與磨耗看平均值,針對機械破壞看極端值。
- 平均值評估 (Average Load Check):
- 必須把機台一個運轉週期內的啟動、等速、減速、休止的時間與負載,利用公式加權計算出「平均負載轉矩」與「平均輸入轉速」。這兩個數值決定了減速機的發熱量與潤滑油壽命。如果平均值超標,將因發熱導致潤滑劑提早劣化,齒面磨耗也會加劇。
- 極端值評估 (Extreme Value Check):
- 即使平均值過關,啟動/停止時的「峰值轉矩」,以及機構可能遭遇的「衝擊轉矩」都必須單獨檢核。只要峰值超過金屬齒根的疲勞極限,彈性齒杯就有斷裂的風險。

結語:進入諧波減速機的精確選型計算
了解了諧波減速機的運作原理、確認了適合自己機台的系列之後,下一步就是拿出實際的運轉參數(轉矩、轉速、時間配比),進行工程計算。
具體的計算公式與 OK/NG 判斷方式,請接續閱讀:Harmonic Drive® 諧波減速機選型指南(六步驟計算流程)。
資料來源
- Harmonic Drive® 產品導覽(Application Guide / Product Guide)
- Harmonic Drive® 精密控制用減速機 綜合型錄
- Harmonic Drive® 伺服馬達用高性能減速機系列
- Harmonic Drive® 機電產品 綜合型錄
- HDS REPORT 2024(統合報告書)
延伸閱讀
想更深入了解諧波減速機?志城實業為您整理相關內容:
- 諧波減速機結構、精度與扭矩特性介紹 - 了解 Harmonic Drive® 的核心設計優勢
- 諧波減速機運作原理介紹 - 深入了解原理與傳動機制
- 諧波減速機選型指南(六步驟計算流程)- 掌握完整選型計算方法
- Harmonic Drive 完整產品線 - 瀏覽所有系列型號與規格
- 下載完整技術型錄 - 取得PDF版詳細規格資料
- 線上選型工具 - 以不同面向挑選適合您的型號
【 需要選型協助或技術諮詢? 】
志城實業提供 Harmonic Drive® 完整產品線與技術支援。
想了解詳細規格數據? 點此瀏覽 Harmonic Drive® 完整產品型錄
更多應用案例與技術諮詢: 志城實業官方網站 | newshiki.com.tw
.png "QRCode+Logo")
本文由 志城實業 獨家統整編輯,技術內容與數據參考自 Harmonic Drive® 原廠產品型錄。未經本公司授權,嚴禁任何形式的複製、轉載或引用於商業用途,違者將依法追究。 實際規格請以原廠最新官方資料為準。

 想了解詳細規格數據?
想了解詳細規格數據?  更多應用案例與技術諮詢:
更多應用案例與技術諮詢: